So average ground speed just over 23mph.
About how many minutes of power remaining? After 48 or 49 minutes is there enough left for a go around? Is climb performance noticeably lower at 45 mins?
So average ground speed just over 23mph.
About how many minutes of power remaining? After 48 or 49 minutes is there enough left for a go around? Is climb performance noticeably lower at 45 mins?
I get a consistent reliable 15 miles of range on a charge flying normally in nil wind… I have gotten up to 20 running the battery to near exhaustion.
With a strong head wind that could be as low as 5, with the same tail wind, as high as 40.
I fly on average 40 minutes and land with 15% battery remaining. OCV 78-80 volts.
I’ve been landing with between 76 and 78 volts. That includes the voltage sag to maintain level flight. There’s enough power to go around again at level flight and a noticeable difference in climbing power. The discharge curve is so steep at this point that there really isn’t much capacity left so I would be surprised if I get more than a minute more. I only ran it till it cut once and that was a 49 minute flight. I like to land with thrust so I prefer to land before it cuts.
Well, I finally had my first flight on my SP 140 V1.0 which I’ve had since December 30, 2021. The weather and schedule conflicts is what caused the nine month delay in completing my first flight.
Here’s my setup:
I’m 208#
Niviuk Hook 5 28M
SP 140 4kw battery
Reserve 140 kg
AUW 290#/132 kg.
Flight mode: chill
Flight time: 35 minutes; climbing to 700’ and cruising around, one additional climb out from 50’ to 250’.
Slow steady climb at 7.1 kw.; Level flight into the wind 8 mph 5.5 - 6 kw.
Landed with indicated 38% @ 84v; battery recovered to 86.3v the next day. Storage charge! 
What do you guys think, is this typical flight times and battery usage?
Yes. My flight today was about the exact same.
For some time I have been observing the information that the throttle handle displays for many after landing. in the forum and especially on facebook. it should only be an indication and referred to nobody as criticism.
if 4 kw/h batteries can realistically use a maximum of 3.8 kw/h with a gentle load because the remainder is converted into heat in the battery and there must also be a remainder, the percentage displays for state off charge cannot be correct.
if you want to see an exact state off charge on the display, this has to be related to the logged capacity drain and not just from the voltage of the battery. Therefore, some manufacturers use the option to “tell” the display what capacity size the battery has that can be used.
as an an example: the battery has 4 kw/h. you then program 3.6 kw/h as a value. as soon as, for example, 1.8 kw/h has been consumed, the display shows 50%. if 3.6 kw/h are consumed, it shows 0%. so the pilot knows exactly what he can use in flight.
it is of course logical that the system must be set depending on the battery cells and performance index. it can also then after e.g. 2 years to be readjusted to compensate for the aging of the battery. then gives as a new value eg. 3.45 kw/h on.
this technology makes it possible to conserve the battery and the display is very convenient for the pilot. the esc is then also adjusted and, as a protective function, also gets the maximum value, e.g. 3.6 kw/h programmed to then reduce the power as a warning or switch off. depending on the request of the user.
This ensures that if the display fails, everything runs correctly. the esc is also given the task of monitoring the battery voltage. depending on the number of cells, it prevents undervoltage, e.g. below 3 volts per cell with li-ion. This also ensures that the battery is defective or very cold, so the capacity cannot afford it but it is not discharged too deeply. I’ve been using this technique for about 8 years. other eppg / Trike / Glider pilots have been using this for over 10 years.
in the field of e-motorcycles and other e-vehicles, this is secured a little more with technology. here, for example, the battery temp. included and the range calculated. in the eppg area this is also possible in the display if you want it.
you can display the remaining motor running time for the current consumption. experts also add the gps and the remaining flight time to the destination is then displayed via the glide ratio and current altitude. Anything is possible these days. I wanted to briefly describe it here.
Good to know, I wasn’t sure if leaving the battery at storage charge for six months was going to affect it’s capacity or not. Hopefully, I can get out at least once a week to put some cycles on the battery.
Yes please to all of that!
This is why EV energy meters are based on Amp-hours, not Watt-hours. The biggest variable comes from the variation in voltage that depends on load, state of charge, temperature, age of cells, everything else. By counting Ah you ignore those factors and the result is more consistent.
Even so, as you said, the “nameplate rating” capacity of the cells won’t be achieved in such a high drain application, so the display still needs to be calibrated to what you can expect to get in typical use.
the variable of the volt under load, temp, etc. is taken into account when counting the watt hours, since the system logs every 1 second and thus recalculates. the display is also the esc. the algorithms are different depending on the manufacturer, but in the long-term test of around 500 discharges (in flight) it turned out that the deviation is less than 3% on average. as well as the calculated value of the internal resistance of the cells in this load range. to conclude my information: the technology has long been mature and available on the market. the accuracy is more than sufficient for users.
Sounds amazing… how do we make it happen?
Second flight with SP140:
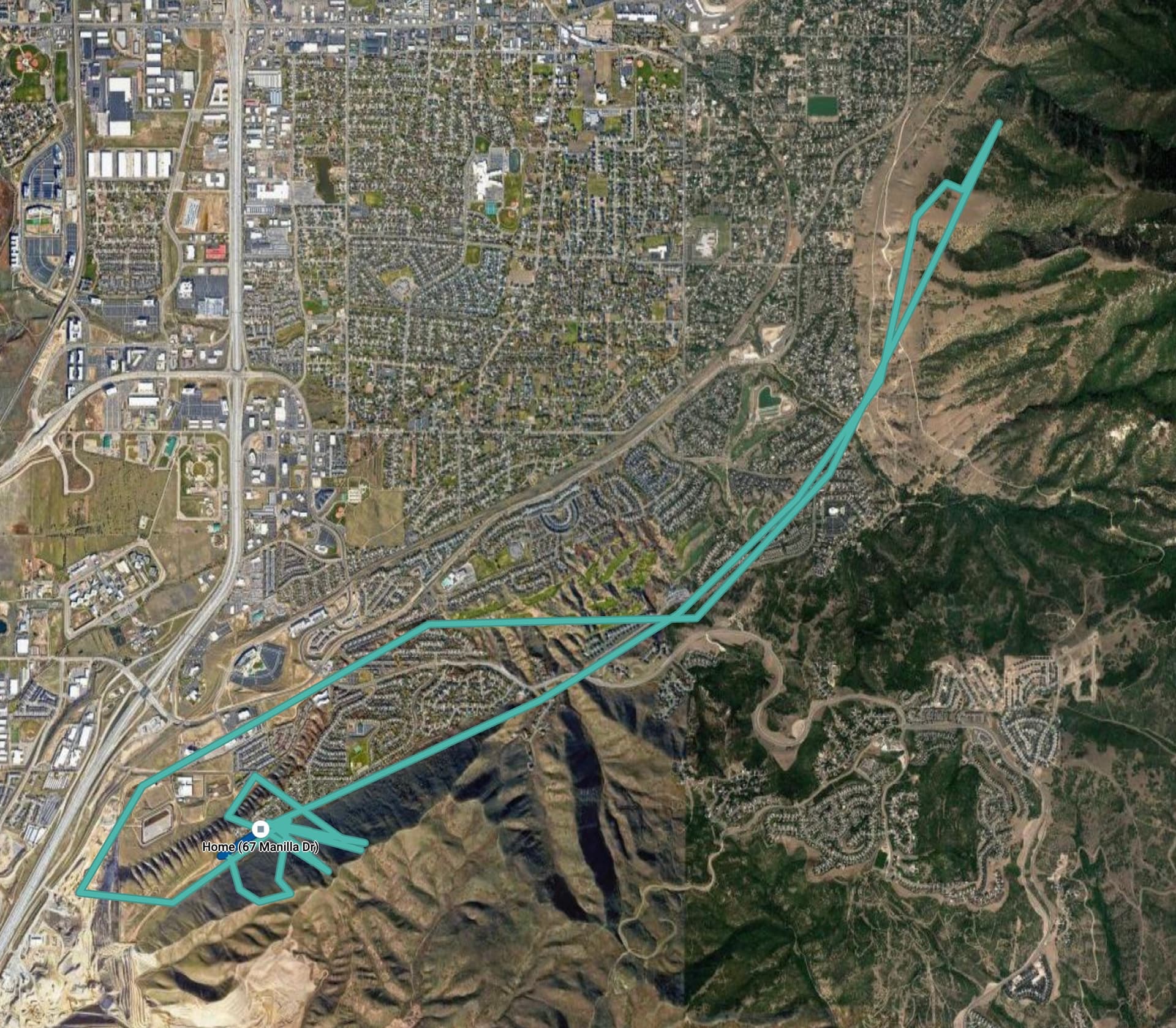
1 Hour 45 minute flight ended with 53% battery with the help of ridge soaring, thermals, and lift lines. Flying a Sirrocco 3 24, with reserve, 4kW battery charged to 98%, and I weigh 145 lbs. The potential for some interesting cross country with this thing has me thinking.
The time is wrong on the controller, I disarmed mid flight to mess with the toggle/throttle positioning, so it reset. My Gaggle track failed to start on launch for some reason, so I had to fall back on the ever-tracking Google Timeline for proof of where I went. It doesn’t show all the thermaling and soaring but the overall track is there. (duplicated from Facebook post)
Nice flight.
So for cross country, would your strategy be to catch thermals to gain some elevation, use that to glide for a long time without the motor, and then find another thermal and repeat?
Thanks! I could have pushed it way farther but I was being super conservative since I’m new to this setup. I easily could have gone to the mountain peak… maybe today…
Dunno! That’s why it has me thinking … what would be the optimal way to do it. Would it be better to motor up without thermals and stay high on thermals, or get high using thermals and use motor to extend glides between thermals, or only use motor for preventing land outs, or use very low throttle and just aid in both climb and glide. Interesting new dimension to XC I hadn’t thought about!
I can’t say I know enough about thermalling - I’m still in the looking for training stage. But one of those might work.
The record distance for paragliding is 350 miles over 11 hours, according to one source. So I’m sure you could cover 1000 miles with one battery if you don’t need any bathroom breaks in 33 hours. 
Cruise Consumption: 3.6 - 3.7kw with maybe 5 km/h winds
last flight was ~42minutes. Voltage sag down to 37% with 6-7kw for my go around.
I would say 50minute is easily achievable with newer battery.
As the battery ages, you’ll get less flight time, so probably looking at voltage would be best. I’m figuring out when a good time to land would be with good reserve for go arounds? cut off is 72v, so breaking 80v seems reasonable to account for voltage sag under go around.
What elevation. I think that plays the biggest part in flight time. I’m on the same wing. My battery is new as of a few months ago and I am getting 35-40 minutes max… I land when my controller is showing 8% when loaded and after landing is showed 26-30% no load. My elevation is 5,200 ish.
Yes, the height plays a very important role. also how high you fly with the engine after takeoff or in between. the climb usually needs 2-3 times as much energy as the cruise flight. the total mass is also very important
. for example, as a pilot you have 150 lbs and only thin clothes and light shoes in summer. or the pilot weighs 200 lbs and has thick winter clothes and heavy boots. the difference is extreme in the flight time if the same wing is used depending on the surface area.
In general: it is not a criticism of the sp 140 but a percentage based on the current voltage of the battery is useless because the percentage cannot be correct.
except when the battery is new and has an exact temperature.
then the display is correct. as soon as the battery is used several times, the percentage displayed is no longer correct.
But that doesn’t really matter if you make sure that you never fall below 3V per cell under load. this value is perfectly sufficient for hobby users.
whoever flies in competitions or xc contests needs an exact measuring method anyway in order to achieve maximum performance without damaging the battery.
one point that also belongs to the possible flight time is the battery temperature at take-off and also during flight. as an example:
a battery has a capacity of 4 kw/h. at 25 degrees celsius at the start, you can use around 3.8 kw/h with a continuous load of 4 kw. if you load the battery 50% with 4 kw and 50% with 8 kw for climbs only around 3.6 kw can be used. the other energy is converted into heat in the battery.
if you start with the battery at 10 degrees battery temperature, around 3.5 kw can be used at a load of 4 kw. in mixed operation 50% 4 kw and 50% 8 kw, there are only around 3.3-3.4 kw that can be used. one can then suffice as the flight time is shortened accordingly. purely due to differences in use and the temperature of the battery block.
I therefore recommend not starting the battery if the temperature is below 20 degrees celsius, since the cell drift is then very low. if you start with a cold battery, the core and the inner cells will heat up differently than the outer ones. In the long term, this also leads to the cells drifting and those that are more stressed lose more capacity.
the values are of course different depending on the cell type. the higher the current capability of the cell, the smaller the difference. it’s just a rough guide to explain it.